La Seconda Legge di Newton: Principio di Proporzionalità
Il secondo principio della dinamica, meglio conosciuto come la seconda legge di Newton, è uno dei fondamenti della fisica moderna. Questo principio, formulato da Isaac Newton nei suoi “Principia Mathematica Philosophiae Naturalis” nel 1687 insieme alle altre leggi del moto, rappresenta una pietra miliare nella comprensione del movimento dei corpi.
Enunciato della Seconda Legge di Newton
La seconda legge di Newton afferma che la forza applicata su un oggetto è direttamente proporzionale alla sua massa e all’accelerazione, seguendo la stessa direzione e verso. In formula matematica, questo si esprime con l’equazione F = m · a, dove F è la forza in Newton, m è la massa in kg e a è l’accelerazione in m/s². Isolando l’accelerazione nell’equazione, otteniamo a = F/m.
Forze Multiple e Accelerazione
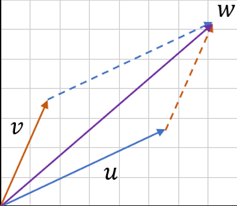
Quando più forze agiscono su un corpo, è necessario considerare il vettore risultante di tutte le forze per determinare l’accelerazione, tenendo conto del modulo, della direzione e del verso delle forze coinvolte. Ad esempio, se due forze di uguale intensità ma con verso opposto agiscono su un corpo, la forza risultante sarà la differenza tra le due forze.
Componenti delle Forze
L’equazione a = F/m può essere espansa in tre equazioni scalari per le componenti x, y e z delle forze. Questo permette di analizzare in dettaglio l’effetto delle forze su un corpo in movimento.
Esercizio Pratico sulla Seconda Legge di Newton
Consideriamo un corpo con massa di 40 kg che viene spinto con una forza orizzontale di 20 N, mentre è soggetto alla forza gravitazionale verso il basso. Calcolando l’accelerazione del corpo trascurando l’attrito, possiamo determinare che l’accelerazione lungo l’asse x sarà di 0.5 m/s².
In conclusione, la seconda legge di Newton rappresenta uno dei concetti fondamentali della fisica, offrendo una base solida per la comprensione del movimento dei corpi e delle forze che lo influenzano.